近日,湖北大学材料科学与工程学院仿生摩擦课题组郭志光教授课题组在国际期刊《Advanced Functional Materials》发表了题为《Janus Spherical Robot With Multiple Wettabilities for Droplet/ Bubble Manipulation》的研究成果,2022级本科生赵子豪和2021级硕士研究生何世平为共同第一作者,郭志光教授为通讯作者。
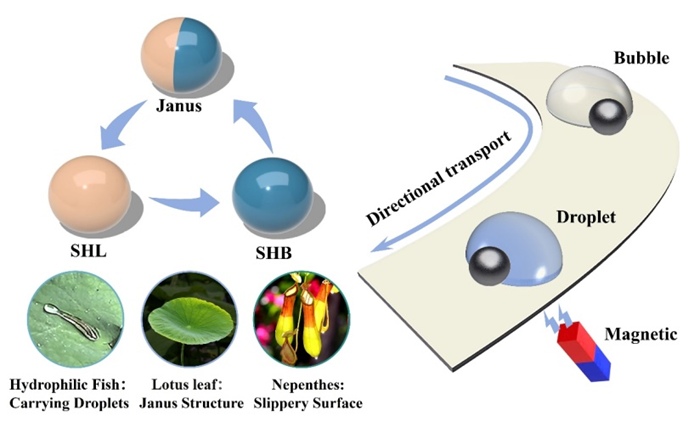
流体(包括液滴和气泡)的灵活操纵和定向输送已成为众多应用领域的关键需求,无论是水资源的高效收集、电解过程的优化、液滴能量的回收利用,还是医疗诊断中的化学微反应,都对流体操控技术提出了更高的要求。然而,液滴和气泡表现出相反的润湿性、亲水性和疏水性之间的固有对立,使得开发能够同时操纵液滴和气泡的操作系统依旧是一项重大挑战。本研究受多种自然生物启发,提出了一种以可切换润湿性的磁致动的Janus球形机器人为液滴或气泡的驱动核心,以固体状光滑表面为操纵平台的液滴/气泡操纵系统,实现了液滴和气泡的双重可编程操纵。值得注意的是,Janus球形机器人在紫外光照射下,其表面可在8分钟内实现超疏水到超亲水的快速切换,且在液滴(气泡)的传输速度和承载体积方面表现出了卓越的能力,分别可以达到18 (13)cm s−1和800 (500)μL。本研究还创新性使用了固体状超滑表面来替代现有工作中的超疏水表面,这项改进不仅有效避免了气泡在超疏水基底上完全铺展而难以移动的限制,还在一定程度上缓解了球形机器人表面与基底间的摩擦,使机器人表面微纳米结构得到有效保护。本工作揭示了机器人在能源、化学合成、电化学制氢等领域的广阔前景,为液滴和气泡的自动化操作提供了一种新颖可靠的方法,拓宽了它们的应用范围。
郭志光教授近年来通过调控材料表面润湿性在油水分离、防冰除冰、水雾收集、气泡操控等领域进行了性能和机理方面研究,取得了系列进展。现任Bio-design and Manufacturing, Journal of Bionic Engineering和Friction杂志副主编,兼任Chem. Lett.、Biosurface and Biotribology、Advanced Bionics、摩擦学学报、中国表面工程等杂志编委,主持承担国家自然科学重点基金项目、优秀青年科学基金项目和面上项目等。在Chem.Rev.,Chem. Soc. Rev., JACS, Adv. Mater.和摩擦学学报等国内外刊物发表学术论文550余篇,SCI引用2万3千多次,H因子78。出版中英文专著3部。
论文链接:https://doi.org/10.1002/adfm.202418725
(审稿:陈亮)

